Tout au long de la conception de cette station de détection automatique, nous avons reçu énormément de courriers pour connaitre son état d’avancement. Depuis quelques années maintenant, UFOCATCH® V1 est fonctionnel. La validation de chaque choix technologique, matériel et logiciel, a été effectuée au cours d’un test en condition réelles sur cible mobile courant 2012. L’occasion de revenir sur chaque étape de son développement.
UFOCATCH® V1est un modèle qui n’a pas pour vocation à être produit en série et vendu au grand public. En effet son coût de développement est estimé aux alentours de 2000 euros.
Il s’agit surtout d’un prototype, qui a permis de développer par la suite son grand frère : UFOCATCH® V2.
Juin 2009
- Récupération d’une Lyre Laser chez un fournisseur et retrait du système optique d’origine.
- Installation des caméras dans le boitier.
Aout 2009
- Finalisation du traitement des données et du pilotage de la tourelle.
- Test du logiciel de détection et du calcul des coordonnées.
- Validation des échanges d’informations en Wifi entre deux stations de détection (protocole Client/Serveur TCPIP).

Septembre 2009
Développement d’une interface pour transférer les coordonnées de déplacement à la tourelle. Elle est composée d’une partie matérielle assurant la conversion des signaux, et d’une partie logicielle assurant le pilotage de celle-ci. La mécanique de la Tourelle est fonctionnelle.



Octobre 2009
Test du système de détection à vitesse lente (pointeur laser sur carte), et à vitesse plus élevée : voiture circulant à 50km/h, à 10 mètres de distance. Des tests de suivi à faible vitesse de déplacement ont été effectués en intérieur, et se sont avérés positifs.


Novembre 2009
Mise en place d’un réseau de diffraction devant l’objectif d’une des caméras. Test de la détection automatique d’un spectre sur une image, et récupération des longueurs d’onde correspondantes.


Début 2010
- Test du zoom automatique (autofocus).
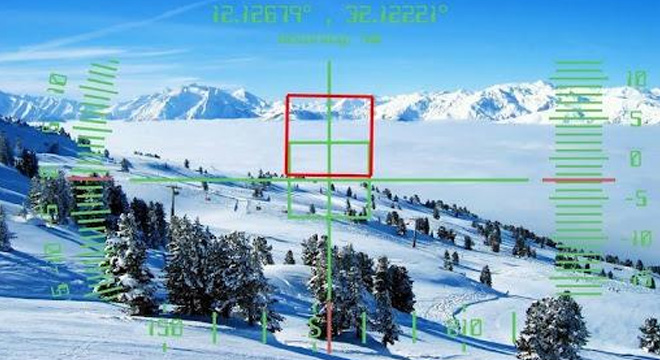
- Test en extérieur avec une cible mouvante (ballon hélium équipé d’une source lumineuse) en nocturne et diurne (Ulm).
- Triangulation à partir d’une deuxième station de détection, celle-ci fixe et située à quelques kilomètres, et transmission des coordonnées par le réseau internet.
- Le prototype UFOCATCH® V1 est opérationnel. Conception d’un caisson de protection pour son transport.